



 IQQA- Guide 手术导航系统
IQQA- Guide 手术导航系统
 IQQA®- Guide
IQQA®- Guide
 Surgical navigation system
Surgical navigation system
 易植美
易植美
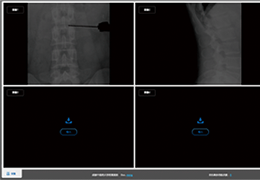
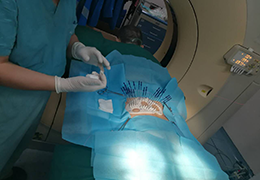
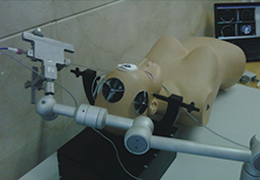
 AccuNavi-A手术导航
AccuNavi-A手术导航
 “智微天眼”手术机器人
“智微天眼”手术机器人
 科智星手术机器人
科智星手术机器人
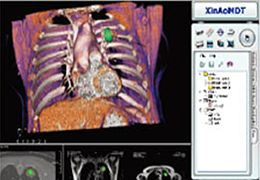
 TrueView三维全定量影像融合术中导航系统
TrueView三维全定量影像融合术中导航系统
 脊柱微创实时导航系统
脊柱微创实时导航系统
 CT介入导航系统
CT介入导航系统
 三维整型机器人
三维整型机器人
 睿米神经外科手术导航定位系统
睿米神经外科手术导航定位系统
 3D模板引导系统
3D模板引导系统
 粒子植入机器人导航系统
粒子植入机器人导航系统
 Excelim-04神经外科手术导航系统
Excelim-04神经外科手术导航系统
 Alkaid® 手术导航设备
Alkaid® 手术导航设备
 PINPOINT手术机器人
PINPOINT手术机器人
 高精度微创介入手术机器人
高精度微创介入手术机器人
 无框架脑立体定向仪CAS-R-2
无框架脑立体定向仪CAS-R-2
 华科精准神经外科创新手术机器人
华科精准神经外科创新手术机器人
 消化内镜手术机器人
消化内镜手术机器人
 单多孔模块化腔镜手术机器人
单多孔模块化腔镜手术机器人
 天玑®骨科机器人
天玑®骨科机器人
 罗森博特手术机器人系统
罗森博特手术机器人系统
 图迈®Toumai®腔镜手术机器人
图迈®Toumai®腔镜手术机器人
 鸿鹄®骨科手术机器人
鸿鹄®骨科手术机器人
 经皮穿刺手术机器人
经皮穿刺手术机器人
 Vdrive Robotic Navigation System
Vdrive Robotic Navigation System
 Niobe® Robotic Magnetic Navigation System
Niobe® Robotic Magnetic Navigation System
 Sirio
Sirio
 Orion
Orion
 Econav
Econav
 Atlas
Atlas
 Collin Navigation Solutions®
Collin Navigation Solutions®
 RobOtol®
RobOtol®
 Fiagon ENT Navigation System
Fiagon ENT Navigation System
 CAS-One® IR
CAS-One® IR
 HEARO
HEARO
 Aim™
Aim™
 Magic Loupe™
Magic Loupe™
 Spotlight™
Spotlight™
 OrthoPilot® Elite
OrthoPilot® Elite
 Klee for Kinematics
Klee for Kinematics
 Mirò for TKA
Mirò for TKA
 Hopper for THA
Hopper for THA
 Rho for Revision
Rho for Revision
 Monet for UniKnee
Monet for UniKnee
 Active Robotics
Active Robotics
 NAVIOS
NAVIOS
 MTG-H100
MTG-H100
 Senhance® Surgical System
Senhance® Surgical System
 neuromate® robotic system
neuromate® robotic system
 RETINA
RETINA
 IRIS
IRIS
 AMPLIVISION®
AMPLIVISION®
 iMNS MEDACTA
iMNS MEDACTA
 StealthStation FlexENT™
StealthStation FlexENT™
 STEALTHSTATION™ ENT
STEALTHSTATION™ ENT
 BrightMatter™
BrightMatter™
 Modus V™
Modus V™
 Navient Cranial
Navient Cranial
 Navient ENT
Navient ENT
 Polaris Vega® ST
Polaris Vega® ST
 Polaris Vega® VT
Polaris Vega® VT
 Polaris Vega® XT
Polaris Vega® XT
 Polaris Vicra®
Polaris Vicra®
 Surgical Navigation Advanced Platform (SNAP)
Surgical Navigation Advanced Platform (SNAP)
 ELMED™ Avicenna Roboflex ™
ELMED™ Avicenna Roboflex ™
 Versius®
Versius®
 SOLOASSIST II
SOLOASSIST II
 Epione®
Epione®
 OpenSight®
OpenSight®
 VisAR
VisAR
 eZGuide®
eZGuide®
 Localite TMS Navigator
Localite TMS Navigator
 UroNav
UroNav
 Vista
Vista
 Panorama
Panorama
 ROSA®KneeSystem
ROSA®KneeSystem
 MONARCH® Platform
MONARCH® Platform
 ROSA ONE Spine
ROSA ONE Spine
 ROSA ONE Brain
ROSA ONE Brain
 HONGHU
HONGHU
 TOUMAI™ ENDOSCOPIC SURGERY ROBOT
TOUMAI™ ENDOSCOPIC SURGERY ROBOT
 放射治疗图像引导系统
放射治疗图像引导系统
 Modern IGS
Modern IGS
 OrthoMap precision knee navigation software
OrthoMap precision knee navigation software
 OrthoMap express knee navigation software
OrthoMap express knee navigation software
 OrthoMap versatile hip navigation software
OrthoMap versatile hip navigation software
 SpineMap Go
SpineMap Go
 Stryker NAV3i
Stryker NAV3i
 Stryker ADAPT
Stryker ADAPT
 Mako SmartRobotics
Mako SmartRobotics
 ROSA Knee System
ROSA Knee System
 ROSA Partial Knee System
ROSA Partial Knee System
 ROSA Hip System
ROSA Hip System
 ROSA ONE Brain
ROSA ONE Brain
 ROSA ONE Spine
ROSA ONE Spine
 慧眼H2000
慧眼H2000
 智眼Z2000
智眼Z2000
 超眼C2000
超眼C2000
 经尿道电切镜手术机器人系统
经尿道电切镜手术机器人系统
 sROBOT 医学机器人
sROBOT 医学机器人
 AimPosition AP-STD-200 光学定位系统
AimPosition AP-STD-200 光学定位系统
 手术机器人教学系统
手术机器人教学系统
 Aimposition AP-LIT-100 光学定位系统
Aimposition AP-LIT-100 光学定位系统
 手术导航解决方案
手术导航解决方案
 手术机器人解决方案
手术机器人解决方案
 精度测试工装
精度测试工装
 定制化工具
定制化工具
 标记球
标记球
 通用型定位工具
通用型定位工具
 机器人测试
机器人测试
 Planmeca Viso
Planmeca Viso
 Planmeca ProMax 3D
Planmeca ProMax 3D
 ROBIO® EX
ROBIO® EX